Dr. Bob’s Ohio University Courses
Teaching interests: Mechanical systems;
kinematics, dynamics, controls, biomechanics,
robotics, haptics.

All of my required and elective undergraduate and graduate courses require the use of MATLAB software as a tool for engineering simulations and animations. This MATLAB Primer is intended to be a general introduction and reference source for MATLAB software in engineering.
Matrices and Linear Algebra Review
A brief review of matrices and linear algebra is presented.
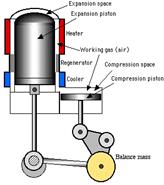
ME 3011 Mechanism Kinematics
& Dynamics and Vibrational Modeling



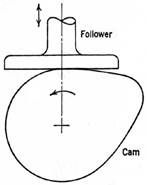
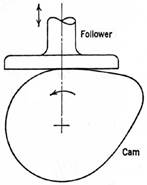
Analytical and graphical solutions of motion problems involving mechanical elements: linkages, gears, cams, and mechanical trains, etc. Basic vibrational system modeling.
· ME 3011 NotesBook Supplement
· Atlas of Structures, Mechanisms, and Robots
· Mechanism and Robot Animations developed at OU
· History of Mechanisms and Machines
Capstone Term Project
Working in teams of two, students must find a real-world mechanism, model it, and perform complete kinematics and inverse dynamics analysis. The system should be planar and one degree-of-freedom; all groups must do a different real-world mechanism application. In addition, students must: Build a model of the mechanism; Present results orally to the class: teach us about the real-world issues; Prepare a written report detailing assumptions, modeling, results, and discussion.
· ME 3011 Capstone Term Project
ME 3011 ABET Outcomes:
Competence Level Outcomes:
1-2.4i.A) The analysis of position, velocity, and acceleration kinematics of mechanisms.
1-2.4i.B) The analysis of inverse dynamics of mechanisms.
Awareness Level Outcome:
1-2.4i.C) Basic analysis of cams and gears.
ME 3012 Linear Systems
Control and Vibrations



Modeling and formulations of physical systems. Transient and steady-state dynamic responses, and other fundamental theory of automatic controls and applications. Free and forced vibrational system responses.
· Dr. Bob's ME 3012 NotesBook
· Dr. Bob's Mechanical Vibrations NotesBook
· Atlas of Models and Transfer Functions
· Michigan/CMU Controls Tutorials
Capstone Term Project
Working in teams of two, students must find a real-world control system, model it, and perform complete open-loop simulation, plus closed-loop controller design and simulation. Each team must attempt several different controllers and compare each to open-loop results and the desired performance specifications. The system should be linearized and SISO; all groups must do a different real-world control system. In addition, students must: Simulate results using MATLAB (Simulink is recommended); Present results orally to the class: teach us about the real-world issues; Prepare a written report detailing assumptions, modeling, results, and discussion.
· ME 3012 Capstone Term Project
ME 3012ABET Outcomes:
Mastery Level Outcome:
e.3a) An ability to solve common engineering problems, including problems involving linear system modeling and analysis of 1 DOF system responses due to free and forced input.
e.3b) The ability to model and simulate single-input single-output linear systems.
Competence Level Outcome:
c.12) The ability to design, implement and evaluate controllers for linear systems.
ME 3550 Mechatronic
Components
This course builds on basic circuits knowledge to develop competence with mechatronic system components such as basic electronic components, digital and analog circuits, microcontrollers, sensors, and electrical and mechanical actuation. Basic theory is integrated with hands-on laboratory implementation to aid students in understanding how mechatronic components function in mechanical systems.
· ME 3550 Laboratory Experiments
ME 4290/5290 Mechanics &
Control of Robotic Manipulators


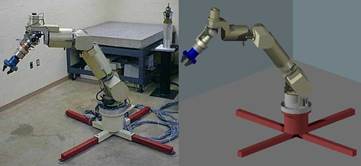


Classification and applications for mechanical manipulator systems. Manipulator motion description, forward kinematics transformations, and solution of inverse kinematics equations. Velocity kinematics and manipulator dynamics equations. Trajectory generation and control schemes including sensory feedback. Laboratory exercises to augment lecture material.
· Dr. Bob's ME 4290/5290 NotesBook
· ME 4290/5290 NotesBook Supplement
· Adept 550 Instruction Manual
· ME 4290/5290 Journal Article Presentations
· RoboDK Robot Simulation Software
ME 4670 / BME 5670
Engineering Biomechanics of Human Motion

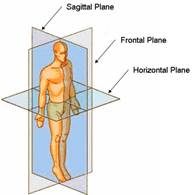

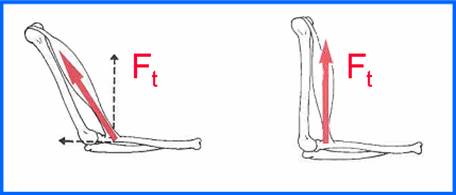

Overview of human skeletal and muscular anatomy and physiology. Application of engineering mechanics to the human musculoskeletal system. Kinematics, statics, and dynamics of human motions. Human motion metrology.
· Dr. Bob's ME 4670/ BME 5670 NotesBook
· ME 4670 / BME 5670 NotesBook Supplement
· ME 4670 / BME 5670 Lab Exercises
· ME 4670 / BME 5670 Journal Article Presentations
· ME 4670 / BME 5670 MATLAB Assignments
· BME 5670 Graduate Term Project