Images of
Robotics, Biomechanics, and Haptics
Hardware/Simulation Projects
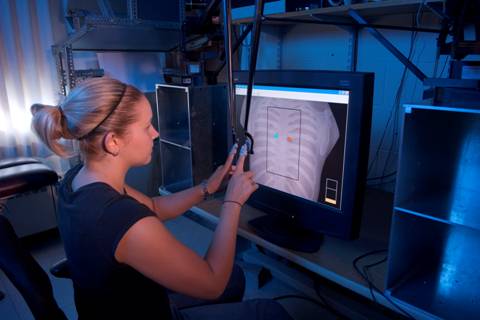
Virtual Haptic
Back

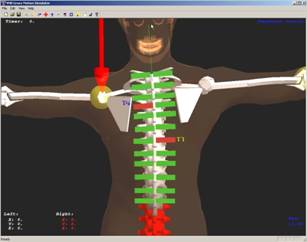
Movable Virtual Haptic Human Upper Body
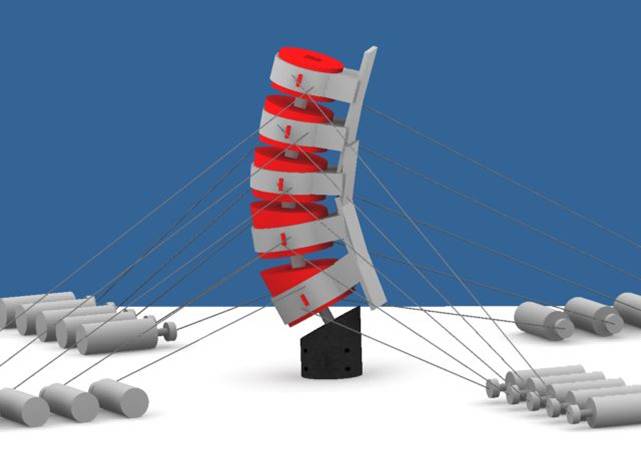
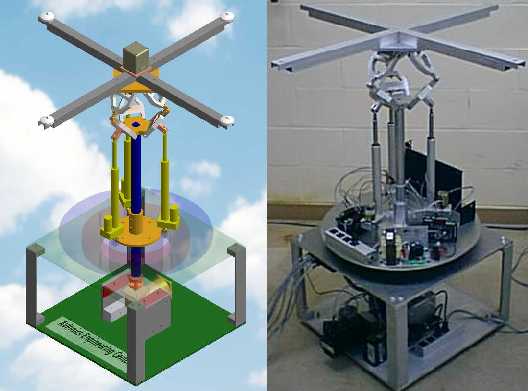
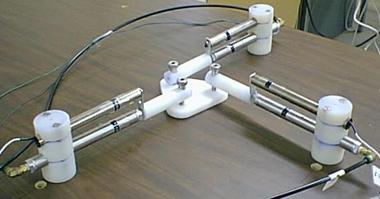
Cable-Driven Lumbar Spine Robot (CAD
Model)
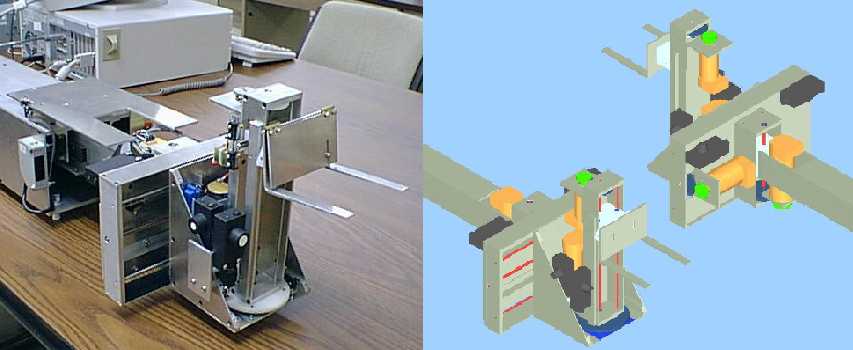
Stewart Glapat Corporation Pallet Handling
Device
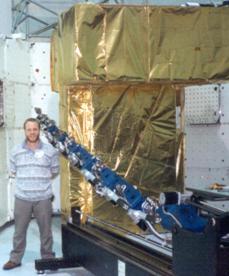
GPS/IMU Calibration Platform with Carpal Wrist
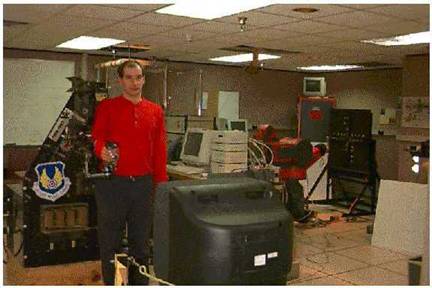

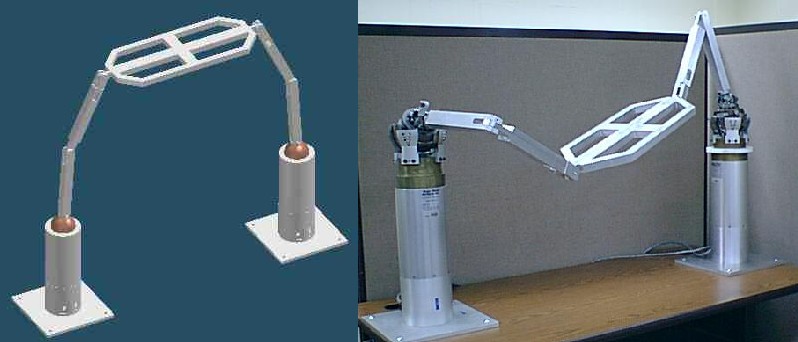
Force-Reflecting Teleoperation at WPAFB
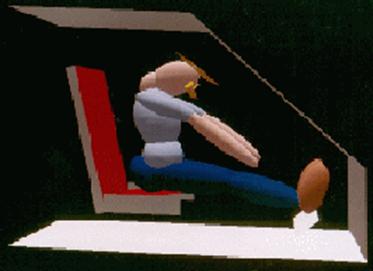
Human occupant crash simulation: ATB and LSDYNA
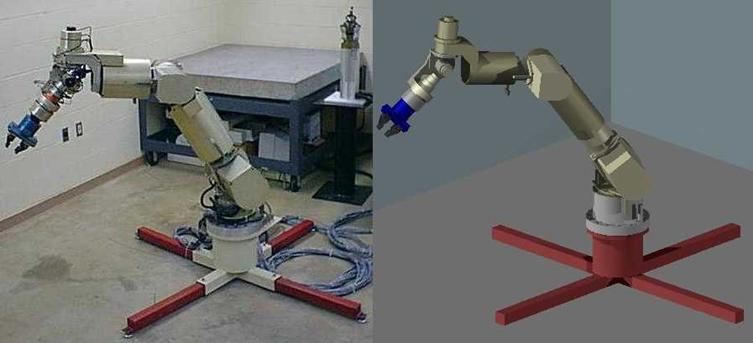
NASA Advanced Research Manipulator II (ARMII) at Ohio University


Variable Geometry Trusses: NASA Module and DOE System


Pneumatic Muscle Actuators
SPherically-Actuated platform Manipulator (SPAM)
Parallel planar 3-RPR manipulator Modified
Paradex Hexapod Manipulator
Cable-Suspended Haptic interface

NASA RoboNaut IGRIP Simulation



PUMA 560 Adept
550 Mitsubishi
Movemaster EX

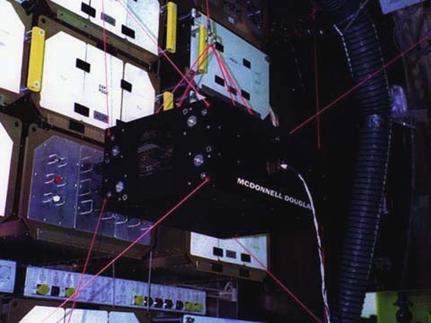
Singularity-free Rosheim Omni-Wrist NASA Johnson/McDonnell-Douglas Charlotte
Robot



Haptic Interfaces: PHANToM IE 2000 Sidewinder
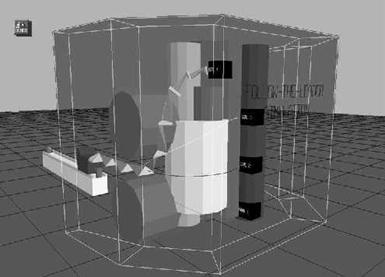
NASA Kennedy Payload Inspection and Processing System and IGRIP Model


Walking Robot Self-Braking
Wheelchair



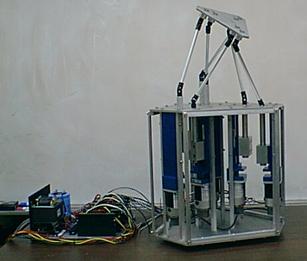
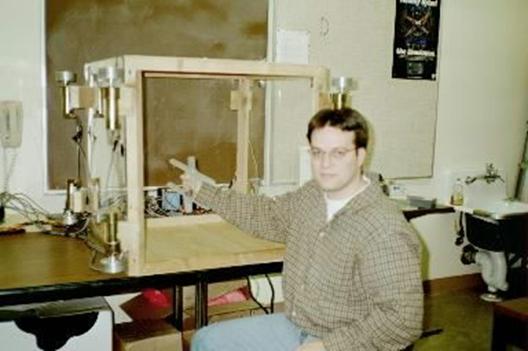
Three-dof Translational Platform Underactuated robotic gripper model Wooden Mechanism Kit


Single rotating link Inverted
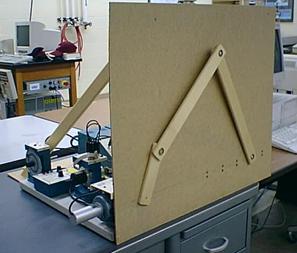
pendulum Four-Bar
Position and Velocity Controller


Parallel planar 3-PRR manipulator model Parallel
planar 3-RRR manipulator prototype Parallel planar truss-based
manipulator model


4-dof Tetrahedral manipulator prototype The
Ross yoke-drive Stirling Engine
{kind=link}

Sailing Kayak Pumped
Storage Flow Control System


Pukyong National University (Korea) ME Students, Summer
2000 OU RoboCup
Team, Summer 2000